Virtual Reality : The Sight
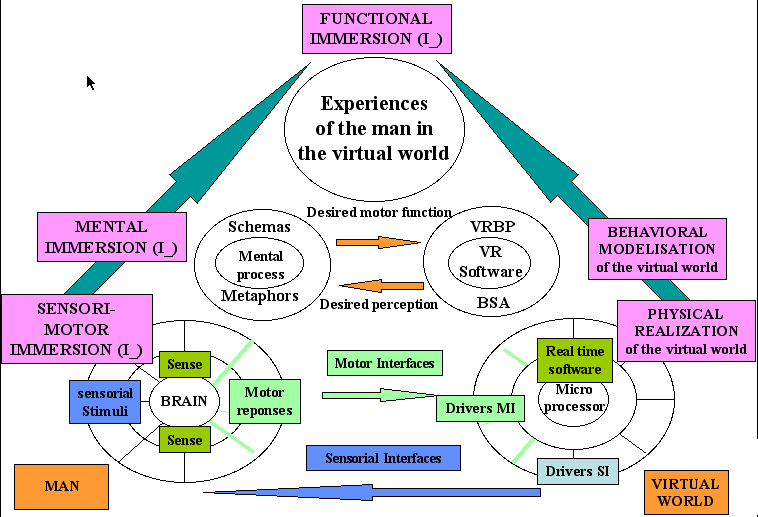
Technocentric Designer Diagram
Our Visual System
Extract from http://cs.wpi.edu/~matt/courses/cs563/talks/brian1.html by Brian Lingard
We obtain most of our knowledge of the world around us
through our eyes. Our visual system processes information in two distinct ways
-- conscious and preconscious processing. When we are looking at a photograph,
or reading a book or map requires conscious visual processing and hence usually
requires some learned skill. Preconscious visual processing, however, describes
our basic ability to perceive light, color, form, depth and movement. Such processing
is more autonomous, and we are less aware that it is happening.
Physically our eyes are fairly complicated organs. Specialized cells form structures
which perform several functions -- the pupil acts as the aperture where muscles
control how much light passes, the crystalline lens performs focusing of light
by using muscles to change it's shape, and the retina is the workhorse converting
light into electrical impulses for processing by our brains. Our brain performs
visual processing by breaking down the neural information into smaller chunks
and passing it thoguh several filter neurons. Some of these neurons detect only
drastic changes in color, others neurons detect only vertical edges or horizontal
edges.
Depth information is conveyed in many different ways. Static depth cues include
interposition, brightness, size, linear perspective, and texture gradients.
Motion depth cues come from the effect of motion parallax, where objects which
are closer to the viewer appear to move more rapidly against the background
when the head is moved back and forth. Physiological depth cues convey information
in two distinct ways -- accommodation, which is how our eyes change their shape
when focusing on distant objects, and convergence, which is a measurement of
how far our eyes must turn inward when looking at objects closer than 20 feet.
We obtain stereoscopic cues by extracting relevant depth information by comparing
the left and right views coming each of our eyes.
Our sense of visual immersion in VR comes from several factors which include
field of view, frame refresh rate, and eye tracking. Limited field of view can
result in a tunnel vision feeling. Frame refresh rates must be high enough to
allow our eyes to blend together the individual frames into the illusion of
motion and limit the sense of latency between movements of the head and body
and regeneration of the scene. Eye tracking can solve the problem of someone
not looking where their head is oriented. Eye tracking can also help to reduce
computational load when rendering frames, since we could render in high resolution
only where the eyes are looking.
The sense of virtual immersion is usually achieved via some means of position
and orientation tracking. The most common means of tracking include optic, ultrasonic,
electromagnetic, and mechanical. All of these means have been used on various
head mouted display (HMD) devices. HMDs come in three basic varieties including
stereoscopic, monocular, and head coupled. The earliest stereoscopic HMD was
Ivan Sutherland's Sword of Damocles, which was built in 1968 while he was a
student at Harvard. It got its name from the large mechanical position sensing
arm which hung frm the ceiling and made the device ungainly to wear. NASA has
built several HMDs, chiefly using LCD displays which had poor resolution. The
University of North Carolina has also built several HMDs using such items as
LCD screens, magnifying optics and bicycle helmets. VPL Research's EyePhone
series were the first commercial HMDs. A good example of a monocular HMDs is
the Private Eye by Reflection Technologies of Waltham MA. This unit is just
1.2 x 1.3 x 3.5 inches and is suspended by a lightweight headband in front of
one eye. The wearer sees a 12-inch monitor floating in mid air about 2 feet
in front of them. The BOOM is head coupled HMD and was developed at NASA's Ames
Research Center. The BOOM uses two 2.5 inch CRTs mounted within a small black
box that has two hand grips on each side and is attached to end of articulated
counter-balanced arms serving as position sensing.